 Žensko preduzetništvo
Žensko preduzetništvo
 Preporuke iz Srbije
Preporuke iz Srbije



 21 ℃
21 ℃
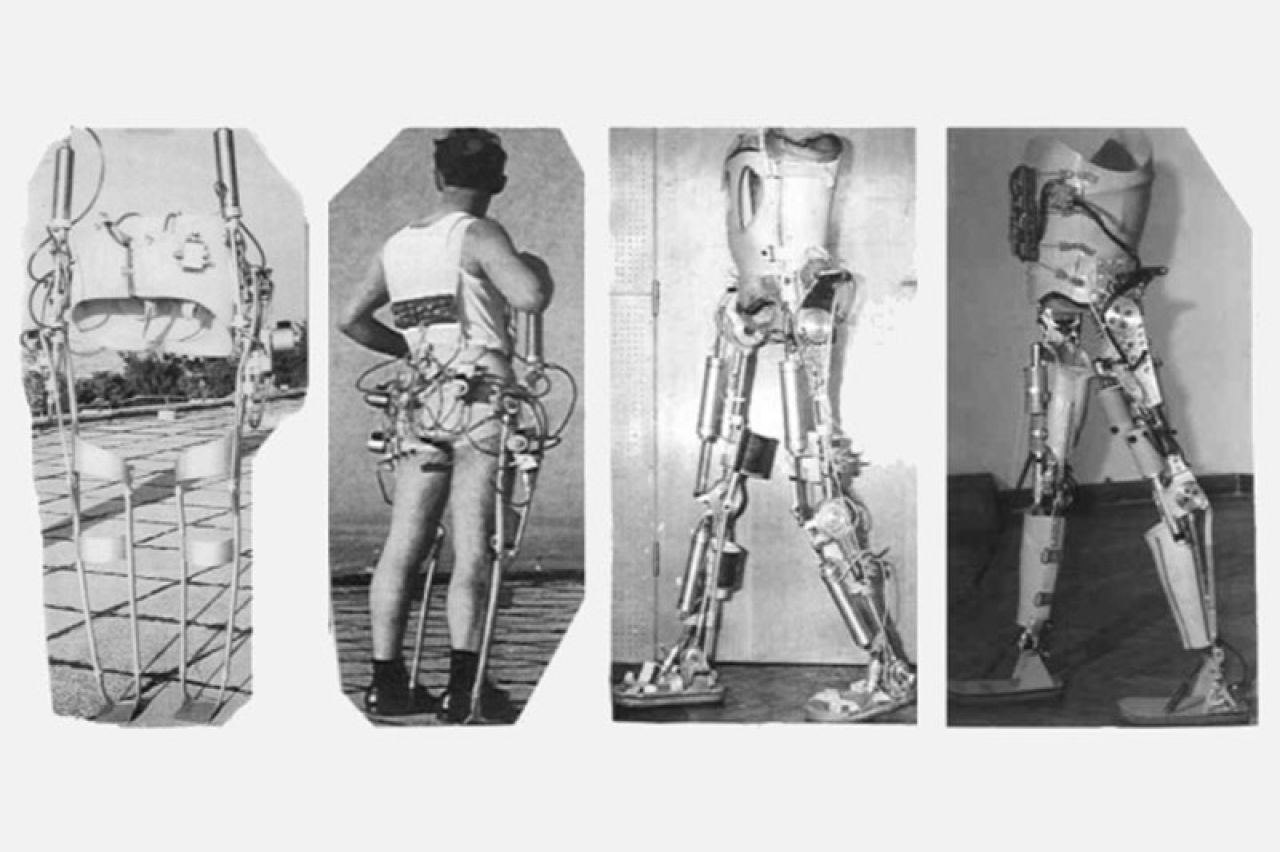
Foto: elementarium.cpn.rs
Kratka i uzbudljiva istorija srpske robotike
Da li ste znali da sam pojam robot potiče od češke reči „robota“ što znači – rad? Ovaj termin se prvi put pojavljuje 1920. godine, u drami R. U. R (Rosumovi univerzalni roboti) češkog pisca Karela Čapeka.
Savremena dostignuća nauke u oblasti dizajna ortopedskih pomagala i razvoj čovekolikih robota uz primenu računarske tehnologije dostigli su takav stepen razvoja da svojim vlasnicima pomažu, zabavljaju i obavljaju kućne poslove umesto njih.
Beogradska šaka
Još šezdesetih godina na Institutu Mihajlo Pupin, u Beogradskoj školi robotike, naši naučnici su se aktivno posvetili izučavanjem metoda za pokretanje robota koje se i danas primenjuju. 1963. godine profesor Rajko Tomović pokrenuo je istraživanja ortopedskih pomagala i započeo izradu prve protetičke robotske šake. „Beogradska šaka“ je prva adaptivna proteza na eksterno napajanje koja je imala mioelektrično upravljanje i senzorsku povratnu spregu i mogla je da izvede dve ključne radnje – stiskanje u pesnicu i skupljanje sa ispruženim prstima. U našoj zemlji nije upotrebljavana u kliničke shrhe, ali je korišćena za istraživanja koja su uticala na dalji razvoj egzoskeleta.
 Foto: elementarium.cpn.rs - Beogradska šaka
Foto: elementarium.cpn.rs - Beogradska šaka
Kretanje robota – tačka nula momenta
Jedan od naših najpoznatijih istraživača i očeva robotike koji je vodio beogradsku školu robotike je, između ostalih, i profesor Miomir Vukobratović. Njegovi prvi radovi su bili iz oblasti matematičkog modelovanja antropomorfnih aktivnih mehanizama i oni su ostavili dubok trag u svetskoj humanoidnoj robotici. Međutim, njegovo najznačajnije istraživanje i ujedno najvažniji korak u razvoju škole robotike bio je njegov rad o tački nula momenta koji je objavljen 1969. godine. U ovom radu objašnjen je princip teorijskog modela kretanja humanoidnog robota na kom se i danas, skoro pedeset godina kasnije, zasniva kretanje svih androidnih robota. Pre nego što je ovaj model kretanja počeo da se primenjuje, roboti su imali veliki problem sa održavanjem ravnoteže u pokretu. Kad robot hoda, različiti intenziteti sile podloge deluju na različite tačke njegovog stopala. Da ne bi pao i da bi pri kretanju održao ravnotežu, potrebno je da se njegov sistem tako reguliše da stalno izračunava sile i vrši popravke grešaka. Upravo na ovom se zasniva upravljanje robotom. Kao i na stopalu čoveka, tako i kod robota postoji tačka gde je momenat svih sila nula. Čim vrednost momenta postane veća od nule, potrebno je regulisati tu vrednost povratnom spregom i tako održati robota u ravnoteži. Za kompletnu simulaciju ljudskog kretanja, potrebno je oko 350 motora, a samo jedan motor ima masu 250 grama. Na bazi novih tehnologija, u svetu se razvijaju veštački mišići, koji bi možda mogli da zamene motore i olakšaju dostizanje cilja.
 Foto: Wikipedia - profesor Rajko Tomović
Foto: Wikipedia - profesor Rajko Tomović
Egzoskelet ili robotsko odelo
Već tokom sedamdesetih godina, razvija se prvi egzoskelet ili robotsko odelo koje se nosi uz telo i njegova namena je da poveća snagu i brzinu kretanja čoveka. Ovaj egzoskelet je služio da pokrene ekstremitete paraplegičara tako što je nadoknađivao do 50 odsto sile potrebne za pokretanje tela. Napravljen je od čvrstog materijala i nekoliko elektropneumatskih i elektromehaničkih motora. Bio je težak 12 kilograma. Napravljen je 1974. kako bi omogućio kretanje nepokretnim pacijentima. Ovaj prvi egzoskelet Beogradske škole robotike je vrlo važan doprinos za istoriju svetske robotike i rehabilitaciju velikog broja pacijenata.
Industrijska robotika
Nakon izrade egzoskeleta, istraživanja na Institutu se vode u laboratoriji za biodinamiku i okreću se industrijskoj robotici. 1978. napravljen je prvi industrijski robot sa antropomorfnom konfiguracijom, koji je potom počeo da se upotrebljava u industriji. Nažalost, tokom osamdesetih i devedesetih, istraživanja robota gube na intenzitetu. Čini se da srpska industrija uopšte zainteresovana za primenu robotskih tehnologija pri osavremenjavanju procesa proizvodnje. Domaći roboti se već godinama ne koriste u industriji, a vrlo malo preduzetnika se odlučuje da investira u ovu vrstu tehnologije, mada ona znatno pojeftinjuje proces proizvodnje. Jedan od retkih primera jeste novi proizvodni pogon kompanije Polimark. Jedan od najsavremenijih industrijskih robota slaže i pakuje kutije majoneza i kečapa, a za rad mu nije neophodna svetlost.
 Foto: Institut "Mihajlo Pupin" - razvojni tim Instituta sa novim projektom
Foto: Institut "Mihajlo Pupin" - razvojni tim Instituta sa novim projektom
Robotika danas
S obzirom na mali broj naučnih radnika u ovoj oblasti, postavlja se pitanje da li je nekada napredna srpska robotika još uvek živa. Danas se grandioznim koracima ide ka razvoju humanoidnih robota visokih performansi. Samo na par mesta u svetu ovi roboti se i razvijaju, a na ostalim se izučava samo teorija. Humanoidni, čovekoliki roboti visokih performansi u bliskoj budućnosti će se koristiti kao pomoć osobama sa invaliditetom, ali i kao kućni pomoćnici u domaćinstvu. Cena ovakvih „pomoćnika“ je još uvek izuzetno visoka, mada je u drastičnom padu u odnosu na pre nekoliko godina.
Nekada ispred svog vremena, srpska robotika danas zaostaje za svetom. Čak i kada bi Ministarstvo za nauku i zaštitu životne sredine uložili veliku sumu novca za istraživanja, teško da bi se jedan ovako mali institut mogao uhvatiti u koštac sa današnjom svetskom tehnologijom.




